


Optimization of the design of mesoscale piezoelectric motors for robotic applications
Projektleiter:
Projektbearbeiter:
M.Sc. Paul Marter
Finanzierung:
Robotics has developed by leaps and bounds over the last few decades and many of the challenges of medium to large scale robotics have found suitable solutions. However, at the mesoscale, on the order of a millimeter to centimeters, few of these challenges have been addressed, chief among them, fabrication and actuation. Due to favourable scaling characteristics, piezoelectric actuation becomes more appropriate than electromagnetic actuation at small scales. Piezoelectric materials provide an actuation as they are materials that generate strain when a voltage is applied to them. They also generate a voltage when strained, which gives them the capability to operate as sensors or actuators, or both simultaneously. Due to their small total displacement, large bandwidth, and lack of friction, they have the ability to generate fast and precise movements.
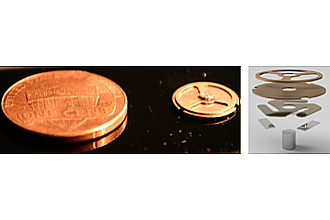
The overall goal is to optimize a new class of piezoelectric motors based on a series of unimorph (a piezoelectric material bonded to a substrate) arms. The Canadian partner, Assistant Prof. Dr. Ryan Orszulik, has recently designed and fabricated a series of prototypes of a piezoelectric motor which has a planar rotor diameter of 9 mm, stator diameter of 8 mm, a total integrated motor thickness of 0.8 mm, weighs approximately 200 milligrams, and is capable of producing bidirectional motion with relatively low rotational speeds but high torque. However, a number of challenges remain, the most important of which is optimizing the torque density of the motor. For this purpose a numerical optimization will be used, which considers the mass and volume limitations, in order to achieve much higher torques without compromising structural integrity. This multi-objective optimization is a very challenging task, especially on such small scales. For mesoscale robotic applications, it is the torque that is of the greatest interest as it mitigates the need for a gearbox, which is very difficult to manufacture and integrate at these small scales. The unimorph based piezoelectric motor that is the focus of this project is simpler to construct, as it relies on non-standard planar fabrication techniques, and requires only a single drive source at a lower frequency to produce a high torque. In this research program, the goal is to leverage new fabrication techniques to create and miniaturize these piezoelectric motors, test them, and optimize them via analytical and finite element techniques. By employing the developed design, modeling, and fabrication techniques, a number of applications will be pursued including miniature autonomous vehicles and surgical instruments. The most promising possible application, which would create further opportunities for collaboration with the satellite design laboratory at York University, is to use these motors as the actuator for single gimbal control moment gyroscopes in pico to femto class satellites.
The overall goal is to optimize a new class of piezoelectric motors based on a series of unimorph (a piezoelectric material bonded to a substrate) arms. The Canadian partner, Assistant Prof. Dr. Ryan Orszulik, has recently designed and fabricated a series of prototypes of a piezoelectric motor which has a planar rotor diameter of 9 mm, stator diameter of 8 mm, a total integrated motor thickness of 0.8 mm, weighs approximately 200 milligrams, and is capable of producing bidirectional motion with relatively low rotational speeds but high torque. However, a number of challenges remain, the most important of which is optimizing the torque density of the motor. For this purpose a numerical optimization will be used, which considers the mass and volume limitations, in order to achieve much higher torques without compromising structural integrity. This multi-objective optimization is a very challenging task, especially on such small scales. For mesoscale robotic applications, it is the torque that is of the greatest interest as it mitigates the need for a gearbox, which is very difficult to manufacture and integrate at these small scales. The unimorph based piezoelectric motor that is the focus of this project is simpler to construct, as it relies on non-standard planar fabrication techniques, and requires only a single drive source at a lower frequency to produce a high torque. In this research program, the goal is to leverage new fabrication techniques to create and miniaturize these piezoelectric motors, test them, and optimize them via analytical and finite element techniques. By employing the developed design, modeling, and fabrication techniques, a number of applications will be pursued including miniature autonomous vehicles and surgical instruments. The most promising possible application, which would create further opportunities for collaboration with the satellite design laboratory at York University, is to use these motors as the actuator for single gimbal control moment gyroscopes in pico to femto class satellites.
Kontakt

Dr.-Ing. Fabian Duvigneau
Otto-von-Guericke-Universität Magdeburg
Universitätsplatz 2
39106
Magdeburg
Tel.:+49 391 6752754
weitere Projekte
Die Daten werden geladen ...