

Integriertes Greif- und Zuführsystem für Anwendungen in der Mikro- und Nanotechnik
Erfinder:
Abed Al Wahab,
Prof. Dr.-Ing. Roland Kasper
Branchen:
Medizintechnik & Medicalprodukte
Angebote:
Lizensierung, Verkauf
Die Erfindung betrifft ein integriertes Greif- und Zuführsystem für Anwendungen in der Mikro- und Nanotechnik zur Manipulation von Mikro- und Nano-Objekten, vorzugsweise zur Mikromanipulation von Zellen.
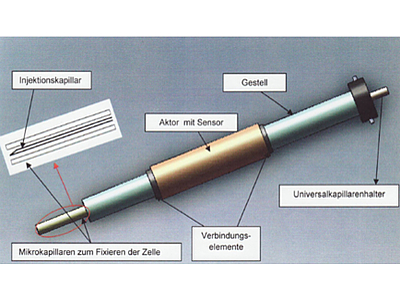
Die Figur zeigt ein Ausführungsbeispiel eines multifunktionalen Mikrogreifers und einer Zuführ-einrichtung. Das integrierte System für die Zelleninjektion besteht aus einer Mikrokapillare, einem Aktor einschließlich Kraft- und Lagesensor und einen Standard-Mikro-Injektor. Die Mikropipette verwendet Vakuum zur Aufnahme der Zellen. Der Aktuator ist verantwortlich für die Bewegung der Mikropipette. Dieser Antrieb ist
von einer Seite mit der Mikropipette und von der anderen Seite mit der Vakuum-Röhre-Ressource durch Verbindungselemente gekoppelt.
Vorteile:
Die Erfindung führt durch die Integration von Greif- und Zuführsystemen und der Kombination von Aktoren und Funktionselementen zu einem System, das sowohl als Antriebsplattform zur Positio-nierung von Mikro- und Injektionskapillare dient, als auch durch entsprechende konstruktive Gestaltung die Injektionskapillare räumlich bewegen kann. Das System ist spielfrei gestaltet. Die Funktionalkräfte werden in Richtung der Bewegungsabläufe in das System eingebracht. Dieses integrierte Greif- und Zuführsystem erweist sich als stabiles, leicht bedienbares und präzise positionierbares Gerät, welches zudem durch einen geringen Herstellungsaufwand gekennzeichnet ist.
Die Figur zeigt ein Ausführungsbeispiel eines multifunktionalen Mikrogreifers und einer Zuführ-einrichtung. Das integrierte System für die Zelleninjektion besteht aus einer Mikrokapillare, einem Aktor einschließlich Kraft- und Lagesensor und einen Standard-Mikro-Injektor. Die Mikropipette verwendet Vakuum zur Aufnahme der Zellen. Der Aktuator ist verantwortlich für die Bewegung der Mikropipette. Dieser Antrieb ist
von einer Seite mit der Mikropipette und von der anderen Seite mit der Vakuum-Röhre-Ressource durch Verbindungselemente gekoppelt.
Vorteile:
Die Erfindung führt durch die Integration von Greif- und Zuführsystemen und der Kombination von Aktoren und Funktionselementen zu einem System, das sowohl als Antriebsplattform zur Positio-nierung von Mikro- und Injektionskapillare dient, als auch durch entsprechende konstruktive Gestaltung die Injektionskapillare räumlich bewegen kann. Das System ist spielfrei gestaltet. Die Funktionalkräfte werden in Richtung der Bewegungsabläufe in das System eingebracht. Dieses integrierte Greif- und Zuführsystem erweist sich als stabiles, leicht bedienbares und präzise positionierbares Gerät, welches zudem durch einen geringen Herstellungsaufwand gekennzeichnet ist.
weitere Informationen
Hintergrund
Für die biologische Forschung sowie Gentechnologie spielt das Einbringen von Substanzen in lebende Zellen eine bedeutende Rolle. Herkömmliche Verfahren für die Zellenmanipulation sind apparativ sehr aufwendig und verlangen eine höchst anspruchsvolle Manipulation.
Marktpotential
Anwendungsgebiete liegen vorzugsweise im Bereich der Zellmanipulation wie Mikroinjektion, Übertragung von Zellkernen etc. Ein weiteres Anwendungsfeld stellen die 3D-Mikrofertigung und 3D-Mikromontage dar. Arbeitsschritte wie Zuführen, Positionieren, Orientieren des der zu manipulierenden Objekte werden bezüglich Ausführgeschwindigkeit und Genauigkeit deutlich verbessert.
Entwicklungsstand
Demonstrator
Dateien
Ansprechpartner Schutzrechte

Dr. rer. nat. Karen Henning
Universitätsplatz 2
39106
Magdeburg
Tel.:+49 391 6752091