
Bionik-Kompetenz-Netzwerk BIOKON Phase II: Designstudien "Bionisches Laufzeug"
Projektleiter:
Projektbearbeiter:
Jenika Hentschel,
Frank Urban Jana Peterschmidt,
Henner Hinze (OLE)
Finanzierung:
Bund;
Forschergruppen:
Konzeption und Entwicklung von Designstudien auf Basis des vom Fraunhofer Institut Magdeburg, Abteilung Robotik entwickelten sechsbeinigen-Bionik-Laufroboters
Die Designstudien "Bionisches Laufzeug" hatten zum Ziel, auf Basis von Laufrobotern des IFF Fraunhofer Institut für Fabrikbetrieb und Automatisierung Magdeburg, Abteilung Robotik, Designideen für praktische Anwendungen zu finden. Dazu wurden auf dem Bionik-Industriekongress, der am 1. und 2.3.2006 im Berliner Maritim-Hotel stattfand sowie auf der Hannover-Messe Industrie 2006 Konzepte für folgende Szenarien und Möglichkeitsstudien vorgestellt:
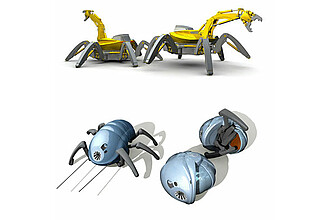
Rückbau-Roboter
In den nächsten 15 Jahren sollen allein in Ostdeutschland 600 000 Wohnungen vom Markt genommen werden. Die Abbruchmaßnahmen von heute stehen in enger Verbindung mit der Sortierung des Abbruchmaterials und der Wiederverwertung gewonnener Bauelemente. Über 80 Prozent der Fertigteile von Plattenbauten können auf diese Weise wieder verwendet werden. Insbesondere für den selektiven Rückbau wird der sechsbeinige Baumaschinenroboter "Brachyo" eingesetzt. Mittels eines Krans wird er auf dem Dach entkernter Gebäude platziert. Von dort beginnt er die einzelnen Decken- und Wandplatten voneinander zu trennen. Der Kran kann sie dann abheben und am Boden sammeln. Durch seine sechs Beine ist der "Brachyo" selbstständig in der Lage eine Höhe von ca. 3m zu überwinden und sich von Etage zu Etage nach unten zu arbeiten. Mit diesem neuen Rückbaukonzept werden schwere und gefährliche körperliche Arbeiten auf den Roboter übertragen. Neben dem autonomen oder ferngesteuerten Modell gibt es auch ein Variante mit Fahrerkabine zur direkten Steuerung.
Lösch-Roboter "OLE"
"OLE" die Offroad Löscheinheit ist ein Konzept zur Früherkennung und ersten Brandbekämpfung. Zusammengerollt nach dem Vorbild des Saftkuglers (Glomeriden) werden in gefährdeten Landstrichen mehrere Roboter positioniert und sind somit während der Wartezeit vor äußeren Einflüssen geschützt. Mittels Biosensoren werden Brände in der Umgebung des Roboters schnell detektiert und weitergeleitet. Durch die sechs Beine und zwei mechanischen Fühlern kann sich "OLE" auch in schwierigen Gelände sicher fortbewegen und erreicht den Brandherd frühzeitig. Ausgestattet mit einer Impulslöschkanone beginnt er das Feuer zu bekämpfen, bevor es sich zu einem großflächigen Waldbrand ausweiten kann. Gelingt das nicht, rollt er sich wieder zusammen und lässt das Feuer über sich hinweggehen. In diesem Fall kommt klassische Löschtechnik zum Einsatz.
Die Designstudien "Bionisches Laufzeug" hatten zum Ziel, auf Basis von Laufrobotern des IFF Fraunhofer Institut für Fabrikbetrieb und Automatisierung Magdeburg, Abteilung Robotik, Designideen für praktische Anwendungen zu finden. Dazu wurden auf dem Bionik-Industriekongress, der am 1. und 2.3.2006 im Berliner Maritim-Hotel stattfand sowie auf der Hannover-Messe Industrie 2006 Konzepte für folgende Szenarien und Möglichkeitsstudien vorgestellt:
Rückbau-Roboter
In den nächsten 15 Jahren sollen allein in Ostdeutschland 600 000 Wohnungen vom Markt genommen werden. Die Abbruchmaßnahmen von heute stehen in enger Verbindung mit der Sortierung des Abbruchmaterials und der Wiederverwertung gewonnener Bauelemente. Über 80 Prozent der Fertigteile von Plattenbauten können auf diese Weise wieder verwendet werden. Insbesondere für den selektiven Rückbau wird der sechsbeinige Baumaschinenroboter "Brachyo" eingesetzt. Mittels eines Krans wird er auf dem Dach entkernter Gebäude platziert. Von dort beginnt er die einzelnen Decken- und Wandplatten voneinander zu trennen. Der Kran kann sie dann abheben und am Boden sammeln. Durch seine sechs Beine ist der "Brachyo" selbstständig in der Lage eine Höhe von ca. 3m zu überwinden und sich von Etage zu Etage nach unten zu arbeiten. Mit diesem neuen Rückbaukonzept werden schwere und gefährliche körperliche Arbeiten auf den Roboter übertragen. Neben dem autonomen oder ferngesteuerten Modell gibt es auch ein Variante mit Fahrerkabine zur direkten Steuerung.
Lösch-Roboter "OLE"
"OLE" die Offroad Löscheinheit ist ein Konzept zur Früherkennung und ersten Brandbekämpfung. Zusammengerollt nach dem Vorbild des Saftkuglers (Glomeriden) werden in gefährdeten Landstrichen mehrere Roboter positioniert und sind somit während der Wartezeit vor äußeren Einflüssen geschützt. Mittels Biosensoren werden Brände in der Umgebung des Roboters schnell detektiert und weitergeleitet. Durch die sechs Beine und zwei mechanischen Fühlern kann sich "OLE" auch in schwierigen Gelände sicher fortbewegen und erreicht den Brandherd frühzeitig. Ausgestattet mit einer Impulslöschkanone beginnt er das Feuer zu bekämpfen, bevor es sich zu einem großflächigen Waldbrand ausweiten kann. Gelingt das nicht, rollt er sich wieder zusammen und lässt das Feuer über sich hinweggehen. In diesem Fall kommt klassische Löschtechnik zum Einsatz.
Schlagworte
Biokon, Bionik, Nachhaltigkeit, Natur, Stoffkreislauf, Technik, intelligente Produkte
Kontakt

Prof. Ulrich Wohlgemuth
Fachbereich Ingenieurwissenschaften und Industriedesign
Institut für Industrial Design
Breitscheidstr. 2
39114
Magdeburg
Tel.:+49 391 8864164
weitere Projekte
Die Daten werden geladen ...